想象一下,在你跳入水中之前能够将你的腿变成脚蹼。耶鲁大学的研究人员创造了一种机器人,它通过一种称为“自适应形态发生”的过程来完成这一壮举。该项目在《自然》杂志上有描述,并出现在该期杂志的封面上。
机器人ART(两栖机器人乌龟)的灵感来自水龟和陆龟,这是一个化石记录跨越1.1亿年的群体。
“陆龟和水龟具有相似的身体,有四个肢体和一个壳,但具有适合其特定环境的独特肢体形状和步态,”JohnJ.Lee机械工程与材料科学副教授RebeccaKramer-Bottiglio和该研究的首席研究员。“海龟有细长的鳍状肢用于游泳,而陆龟和陆龟有圆形的腿以便在行走时承重。”
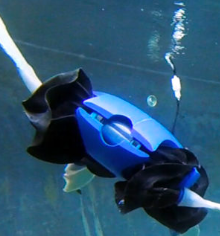
该机器人具有可变形的四肢,可以根据环境调整其形状、刚度和行为。当从一种环境过渡到另一种环境时,四肢使用可变刚度材料和人造肌肉来改变它们的形状。在有腿状态下,ART可以以各种四足陆地步态穿越陆地。到达水体后,ART可以将其腿变成鳍状肢,使其能够以基于升力和阻力的水生步态游泳。
“你几乎可以将[适应性形态发生]视为一种按需进化的形式,”自然科学首席物理科学编辑KarlZiemelis写道。
该机器人与其他两栖机器人的不同之处在于,它利用形状适应性在水上和陆地环境中使用相同的部件进行推进。其他方法为同一个机器人添加多个推进机制,在每个环境中使用不同的推进机制,导致能源效率低下。“我们的结果表明,自适应形态发生可以提高机器人在多种环境中移动的效率,”Kramer-Bottiglio说。
那么,您如何处理以乌龟和乌龟为灵感的两栖机器人呢?潜在的应用很多。Kramer-Bottiglio的实验室专注于包括海岸线生态系统监测、潜水员支持和海洋养殖在内的应用。该机器人还将帮助研究人员研究复杂冲浪区和其他环境过渡区的运动物理学——那里的波浪、水流和浑浊度使机器人设备导航特别困难。